Part 0
摘要:由于学业的专注点原因,许多人对线性代数的理解尚停留在代数计算方面,而并不能理解一些定义和法则是从何而来以及线性代数的本源意义。在此意义上,本文不失为一个较直观的线代入门。
Part 1 线性空间的概念
1.1 向量的实质
首先搬出一般的定义:同时具有大小与方向的量。但对于oiers来说,事实上m维向量就是具有m个元素的列表,例如stl中就把动态数组作为vector(向量)。线性代数中,常常把向量的起点认为是原点,而终点就可以唯一地表示一个向量。
在第一种意义上,向量指导了在空间中的运动。向量$\alpha=(a_1,…,a_n)$表示分别向第i个坐标轴上移动$a_i$的长度。两个向量的相加运算就是先后执行两个运动,显然有$(\alpha+\beta)_i=\alpha_i+\beta_i$。以此为基础理解数乘,即得$(k\alpha)_i=k\alpha_i$。
在第二种意义上,n维向量是用n个独立元素来确定一件事物。例如我们只关心一本书的页码和价格,就可以向量用$(pages,prices)$来表示这本书。向量的加法和数乘就是多个书的叠加。
数学上,我们会折合两种说法。例如,函数就是一个隐藏的向量。函数的加法就是把每个点对应的两个函数值相加,数乘就是每一个点对应的函数值与该数相乘,这对应$(f(x_1),f(x_2),…)+(g(x_1),g(x_2),…)$和$k(f(x_1),f(x_2),…)=(kf(x_1),kf(x_2),…)$,对于函数的变换,甚至可以求特征向量$Ff(x)=\lambda f(x)$(后文会讲到)。只不过感觉有无穷多个元素,即无穷维向量。
鉴于线性变换的意义,规定只要满足相加和数乘意义的量就是向量。
这里的“相加和数乘意义”具体指如下八条法则:
若集合V中,有:
- $\alpha+\beta=\beta+\alpha$
- $\alpha+(\beta+\gamma)=(\alpha+\beta)+\gamma$
- 存在唯一的$0\in V$,使对于任何$\alpha\in V$有$\alpha+0=\alpha$
- 存在唯一的$\beta\in V$,使$\alpha+\beta=0$
- $1\alpha=\alpha$
- $k(p\alpha)=(kp)\alpha$
- $(k+p)\alpha=k\alpha+p\alpha$
- $k(\alpha+\beta)=k\alpha+k\beta$
则称V为线性空间或向量空间,V中元素称为向量。容易验证,数列、矢量、函数都满足这些要求。
1.2 线性组合、张成的空间与基向量
线性组合:若干个向量$\alpha_i$,对于任何一组数$a_i$,称$a_1\alpha_1+a_2\alpha_2+…+a_m\alpha_m$为它们的线性组合。通过几个以原点为起点的向量的线性组合,能够到达的所有区域称为它们张成的空间。
线性无关:若干个向量不能用彼此的线性组合表示出,则称它们线性无关。
在n维空间中,有一组特别的向量,它们是每个坐标轴上的单位向量。即$i=(1,0,0,0,…),j=(0,1,0,0,…),k=(0,0,1,0,…)$等等。通过向量加法的定义,我们可以知道它们可以张成整个n维空间,也就是说,能够通过线性组合表示出任意n维线性空间的向量。这一组特别的向量称为标准正交基,它们是长度为1、互相垂直的向量。
但是可以发现,事实上任意n个线性无关的向量都能够张成全空间。如果以它们作为单位向量,显然可以构建出一个网格,我们在这个线性空间内把向量的每个值理解为在每个“单位向量”所在坐标轴上的投影。但如果线性相关,则有一个“单位向量”显然会和剩余n-1个共n-1维平面(这一点很显然,请自行思考)。这样就只能张成小于n维的空间了。
n维空间这组线性无关的向量称为它的一组基或基向量。
Part 2 矩阵的本质与线性变换
“变换”一词其实就是“函数”的花哨写法。它接受一个输入向量,并给出一个输出向量。在变换中,有一类是比较容易理解且用处较多的,它们被叫做线性变换。何谓“线性”?即满足任何一条直线变换后仍是直线、原点位置不变的变换。换句话说,满足坐标网格变换后平行且等距。
那么我们究竟如何用数值来表示这一变换呢?事实上,由于线性变换的性质,我们只需要考虑基向量是如何变换的。以二维空间为例,在输入空间里,基是$(1,0)$和$(0,1)$,但输出空间中,基可能变成了$(0,1)$和$(-1,0)$(注:这是逆时针旋转90°的操作)。由于网格线平行等距,变换前的线性组合仍然成立。也就是说向量$(a,b)=a(1,0)+b(0,1)$,在新的空间中便是$a(0,1)+b(-1,0)=(-b,a)$。我们记录变换后的基向量的位置,把他们从左到右写一遍,凑成一个方阵$\begin{pmatrix}0&-1\\1&0\end{pmatrix}$,则这个线性变换可以唯一地用这个方阵表示,称为“矩阵”,并且定义$\begin{pmatrix}0&-1\\1&0\end{pmatrix}\begin{pmatrix}a\\b\end{pmatrix}$是变换后的向量,即$\begin{pmatrix}0a-1b\\1a+0b\end{pmatrix}$。
类似地,推广到n维空间,可以得到:
但是,我们目前所述的所有矩阵,都是$n\times n$的方阵。那么非方阵的$n\times m$矩阵又是怎么回事?
事实上,线性变换并非n维到n维,一个从n维到m维的变换是完全合理的。例如以下的变换:
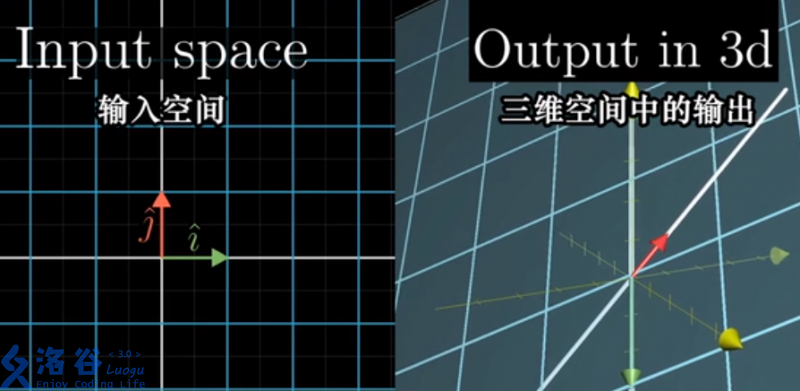
这是一个二维到三维的变换,可以看出,输出空间是一个三维空间中的斜面。我们同样把变换后的基向量坐标拼接在一起,成为一个$3\times2$的矩阵:
第一列和第二列分别是两个基e1和e2变换后的坐标。这个矩阵与二维向量相乘,并输出一个三维向量。这就是非方阵的意义。
总结一下重点
矩阵与线性变换一一对应。由于在线性变换前后同一线性组合的系数不变,则变换前后任意一个向量都可以写作基向量的同一线性组合,故我们可以用变换后的基唯一表示一个线性变换。我们将变换后的基向量从左到右写成一张数表,将其称为矩阵。线性变换作用于向量上,定义为矩阵左乘一个向量。
这里是时候讲矩阵乘法了。
考虑对X先作一个线性变换B,再作一个线性变换A,显然结果是$A(BX)=ABX$(说明:矩阵乘法从左往右算,但是对应的线性变换是从右往左分别执行)。考虑到B是变换后的基,再作变换A,最终基落在$AB_i$,其中i表示第i个基。因此我们用A对B中每个矩阵分别相乘,得到:
事实上,由于线性变换并不一定与执行顺序无关,矩阵乘法没有交换律。
补充说明:“变换F执行后,网格线平行且等距”一性质,与下面的两条法则完全等价:
Part3 行列式
在一个矩阵A对应的线性变换下,一个区域广义体积的放大率,称为A的行列式,记作$|A|$或$\det(A)$。行列式的符号有严格的规定,后文将详述。但如果认为体积非负,那么放大率为行列式的绝对值$||A||$,在可能有歧义时,本文将行列式记作$\det A$,绝对值记作$|x|$。
由“网格平行且等距分布”一性质,可得到一推论:任何区域在相同的线性变换下有相同的放大率。因此,只需要考虑标准正交基所形成的n维立方体的放大率。我们说过矩阵代表基的坐标,因此可以用n阶单位阵来表示标准正交基。则:$\det A=vol(AI)/vol(I)=vol(A)$,其中vol表示矩阵每个列向量所构成的n维平行多面体有向体积(即叉积)。
利用行列式几何意义显然可以得到如下性质($A_i$表示第i行或列向量):
性质1
性质2(体积有向的体现)
性质3
利用这几个性质,有如下推导(E表示单位阵):
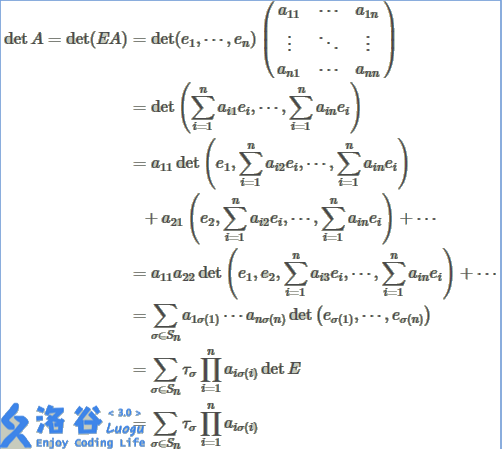 (LaTeX太长懒得打了)。
(LaTeX太长懒得打了)。
这便是同济《线性代数》书中的定义。其中$\tau_\sigma=(-1)^{\text{排列}\sigma\text{的逆序数}}$,$\sigma$为$1,2,3,…,n$的一个排列。
注意第6、7个等号后面的式子,有$\det(e_{\sigma(1)},…,e_{\sigma(n)})=\tau_\sigma$,这就是所谓“有向”体积。读者不妨从逆序数的定义出发,思考一下这个等式的实际意义。
行列式的计算:
基础概念
- 主对角线以下(上)的元素都为0的行列式叫做上(下)三角行列式。
- 既是上,又是下三角行列式的行列式叫做对角行列式。
- 去除矩阵A的第i行,第j列后的行列式称为$a_{ij}$的余子式,(在不引起歧义时)记作$M_{ij}$。$(-1)^{i+j}M_{ij}$称为$a_{ij}$的代数余子式,(在不引起歧义时)记作$A_{ij}$。
法一:转上(下)三角行列式,即高斯消元
行列式计算首推此法。
对于下三角行列式,有:
证:对于行列式展开式的乘积中不为0的元素$\tau_\sigma\prod a_{iJ_i}$,必有$J_i<=i$,又因为是1-n的一个排列,有$\sum J_i=1+2+…+n$,可以迭代求出$J_i=i$。显然$\tau_\sigma=(-1)^0=1$,所以得证。
应用性质1、2,可以把任何行列式转为这种形式。
例题:求
解:第一行加到第二行:
第三行乘-1/3加到第一行:
第二行乘-2加到第一行:
为了方便编程实现,一般转成上三角行列式。上三角行列式的值仍然等于对角线元素之积。读者不妨模仿下三角行列式证明之。
法二:按行(列)展开
定理:$D=\sum\limits_{1\le j\le m}a_{ij}A_{ij}$
求范德蒙德行列式是一个很好的例题。
$D_n=$ ,则
,则
证明:
法三:公理化定义法
此方法一般用于求一些特殊东西的行列式,例如:
为啥?横纵坐标各放大k倍、p倍,总放大率当然是kp啦。至于函数变换为啥能求行列式?Part1有详细解释。
$Ff$为线性变换的充要条件:$f$为向量,且$F(f+g)=Ff+Fg$且$F(kf)=kFf$。
再来一个比较复杂的例子:
前面说了函数符合向量的定义,因此这显然是一个线性变换,因为$F(f+g)=Ff+Fg$且$F(kf)=kFf$。
它的逆变换呢?学过傅里叶变换的同学可以知道:
x多了一个负号?这意味着将空间的手性取反。而这并不影响放大率,只影响符号。而由于$\det(kA)=k\det A$,故综上得到:$\det(F^{-1})=-\dfrac1{2\pi}\det(F)$。
又因为$FF^{-1}=I$,所以$\det F*\det F^{-1}=\det(FF^{-1})=\det I=1$
代入后得到$\det F=\pm\sqrt{2\pi}$。
Part4 逆矩阵、列空间与零空间
逆矩阵
满足$AB=BA=I$时,称AB互为逆矩阵,记作$A=B^{-1}$或$B=A^{-1}$。
逆矩阵的几何直观是:在线性变换A下,向量X变为了向量Y,现在给出了A和Y,求倒退回X。显然因为$AX=Y$,故$X=A^{-1}AX=A^{-1}Y$。因为在一般情况下,执行变换A,再变回来($A^{-1}$)等于什么都没做(恒等变换)。
然而事实上,当$\det A=0$时,由于放大率成了0,说明变换后的图形不再具有n维体积,必然降到了一个更低的维度。这就导致了许多个一个向量坐标变换后重叠。非单射函数没有反函数,因此A没有逆矩阵。
逆矩阵的求法如下:
前置概念:
- 把矩阵A中的每个元素换成其代数余子式,再进行转置运算,构成A的伴随矩阵,记作$A^{*}$。
- 把矩阵的某一行(列)乘k加到另一行(列),或交换矩阵的两个行(列),称为矩阵的初等变换。一个矩阵经过有限次初等变换构成的矩阵,称为原矩阵的等价矩阵。
- 转置:把矩阵A的行换成同序数列的操作称为转置矩阵,记作$A^T$。有:
$(A^T)^T=A$
$(A+B)^T=A^T+B^T$
$(\lambda A)^T=\lambda A^T$
$(AB)^T=B^TA^T$
example:$\begin{pmatrix}a_{11}&a_{12}&…&a_{1n}\\a_{21}&a_{22}&…&a_{2n}\...&…&…&…\\a_{m1}&a_{m2}&…&a_{mn}\end{pmatrix}^T=\begin{pmatrix}a_{11}&a_{21}&…&a_{m1}\\a_{12}&a_{22}&…&a_{m2}\...&…&…&…\\a_{1n}&a_{2n}&…&a_{mn}\end{pmatrix}$
定理:$A^{-1}=\dfrac1{|A|}A^{*}$
显然A有逆的充要条件是$|A|\not=0$。利用$|AB|=|A||B|$可以非常轻松地证明此条件,此处不再赘述。我们把$|A|=0$的矩阵称为奇异矩阵,否则称为非奇异矩阵。
另一种方法:高斯消元
构造增广矩阵$[A|I]$(把A写在左边,I写在右边拼接成的矩阵),用初等变换变换把左边变换为与之等价的对角矩阵。每行提出一个系数,把增广矩阵变换成$[I|B]$的形式。则$B=A^{-1}$。
证明:因为只有初等变换,所以相当于$P[A|I]=[I|B]$,即$PA=I,P=B$。因此得证。
一些性质:
$(A^{-1})^{-1}=A$
$(kA)^{-1}=\dfrac1k A^{-1}$
$(AB)^{-1}=B^{-1}A^{-1}$
例题:
1.求X使$AXB=C$
解:$A^{-1}CB^{-1}=A^{-1}AXBB^{-1}=X$
列空间、零空间与秩
三句话概括书中也许十分冗长的定义:
列空间:矩阵的所有列向量张成的空间。
秩:矩阵列空间的维数。记作$rank(A)$。
零空间:使关于向量X的方程$AX=O$的解空间。
当秩等于矩阵的行数和列数的最小值时,称为满秩。只有秩不满时,空间被变换成一个维度更低的空间,则显然有无数组向量被压缩到原点,只有满秩时,零空间有且仅有一个向量构成。很明显地,一个矩阵为满秩当且仅当行列式非零。
Part5 基变换
现在有一个线性空间,有两组基向量。那么在每一组基下,向量$(a,b,…)$会被看做这一组基$e_1,e_2,…$的线性组合$ae_1+be_2+…$。
可以看出,同一个向量在不同的基下有不同的坐标。那么如何把一个向量在两组不同的基中转换?现在的基是一组标准正交基,前面说过那么矩阵的每一列就代表每一个基变换后的坐标。我们把新的基从左到右凑成一个矩阵,称为变换矩阵。用这个矩阵左乘新基下的向量,就能得到这个向量在原有基的意义下的坐标。而现有基下的向量左乘变换矩阵的逆矩阵,即可得到新基下的表示。
例如,向量$(a,b)$在新的基$(1,1),(0,1)$下表示为$\begin{pmatrix}1&0\\1&1\end{pmatrix}^{-1}\begin{pmatrix}a\\b\end{pmatrix}$。
在进一步,用新基意义下的一个矩阵A作用在现有基下的向量X,结果用现有基来表示。这个问题如何解决?
可以先对向量做基变换(左乘$P^{-1}$),再变换回来。设变换矩阵为P,则结果:$PAP^{-1}X$。
这样的变换有什么用武之地呢?下一部分揭晓。
Part6 特征向量与特征值
可以发现,在某些变换后,有一系列向量仍然位于原来的直线上,它们只被进行了缩放,而没有改变方向。求出这些特殊向量使很有价值的,因此有如下定义:
若$AX=kX$,其中k为数,则称X为A的特征向量,k为A的特征值。
则$(A-kI)X=0$,由$\det(AB)=\det A\det B$得:若X不是零向量,则$\det(A-kI)=0$。
它的一个应用是对角化矩阵:定理:若$P^{-1}AP$为对角矩阵,则$p_i$为A的特征向量。
证:设$P^{-1}AP=diag(k_1,k_2,…,k_n)=K$(注:表示对角线分别为$k_1,…,k_n$的对角矩阵),则:$AP=PK$,则显然有$Ap_i=k_ip_i$,得$(A-k_i)p_i=0$,即P的第i列向量$p_i$是A的特征向量,$k_i$是对应的特征值。
我们结合Part5基变换的知识,可以得到:
因此
这就给出了一个计算矩阵n次幂的有效方法。
例如:斐波那契数列满足:
那么特征值有$\begin{vmatrix}1-k&1\\1&-k\end{vmatrix}=0$
解得:$k=\dfrac{1\pm\sqrt5}2$则$K=\begin{pmatrix}\dfrac{1+\sqrt5}2&0\\0&\dfrac{1-\sqrt5}2\end{pmatrix}$
特征向量:$\begin{pmatrix}1&1\\1&0\end{pmatrix}\begin{pmatrix}x\\y\end{pmatrix}=k\begin{pmatrix}x\\y\end{pmatrix}$
求解后发现:$x=\dfrac{1\pm\sqrt5}2y$
取一组简单一点的解:$\begin{pmatrix}1+\sqrt5&1-\sqrt5\\2&2\end{pmatrix}$
这就得到了P。
剩余内容请自行完成。推荐使用Geogebra软件帮助计算。
这里po出结果:$F_n=\dfrac{\sqrt5}5((\dfrac{1+\sqrt5}5)^n-(\dfrac{1-\sqrt5}5)^n)$
Part7 克拉默法则
方程组
当其系数矩阵A的行列式非零时,有唯一解:
其中$|A_i|=\det(A_1,…,A_{i-1},B,…,A_m)$
普通的证明可以百度,但这里我们用几何角度来解释。
对于二维变换,我们可以这样理解: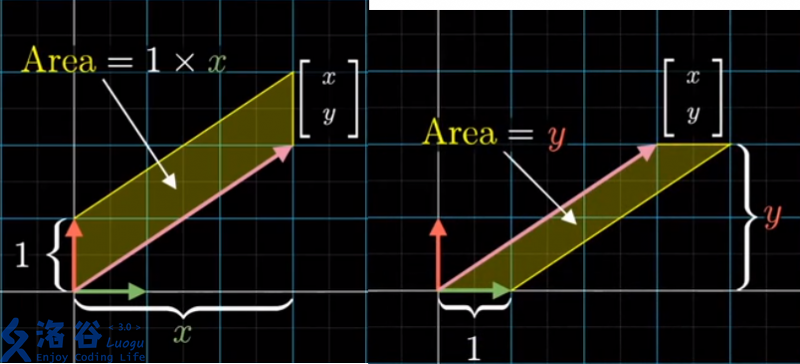
即用平行四边形面积表示x和y。
例如变换$AX=\begin{pmatrix}2&-1\\0&1\end{pmatrix}\begin{pmatrix}x\\y\end{pmatrix}=B$
我们就可以用这个平行四边形变换后的面积/行列式=x或y。
那么如何求变换后的面积?
显然变换后的基由矩阵给出,则变换后x轴基$=(2,0)$,y轴基$=(-1,1)$。那么途中粉色的部分变换后显然由方程中的B向量给出。因此,变换后面积=基向量与B构成的平行四边形面积。由于前文讲过的行列式几何意义,有:
推广到n维变换,亦是如此。
Part8 一些彩蛋
1.如果认为函数$f(x)=\sum\limits_{k=0}^na_kx^k$的向量表示如下:
则微分算符$D=\dfrac{d}{dx}$满足:
显然有$\det D=0$,因为第一列为0向量。这有一个很好的解释:微分算符D是没有逆运算的。
2.傅里叶变换是可以求特征向量的。它的特征向量为